I (Angela) recently had the opportunity to attend PLAY MAKE LEARN on the UW-Madison campus. It is an excellent annual conference that represents the intersection of a lot of what I do here at Lawrence University- with library instruction, teaching in the makerspace, and teaching game studies. This prompted me to submit a poster to visualize how all of these intersect and share some common themes that are crucial skills for today’s learners. The idea of seemingly different areas of study coming together reminded me of the goal of liberal arts education- so I named my poster “Making and Gaming in the Liberal Arts.” It was wonderful to talk with so many technologists, librarians, K-12 educators, professors, game designers, and graduate students during the poster session (and throughout the conference). While looking at this poster, one librarian pointed out that the library often plays a large role in technology literacy. While those are not connected on the diagram in the poster, I certainly agreed with her. Another librarian commented that perhaps the library on the top could be seen as an umbrella- which I decided was intentional. 🙂
PLAY MAKE LEARN was a rewarding and engaging conference, and I look forward to returning next year!
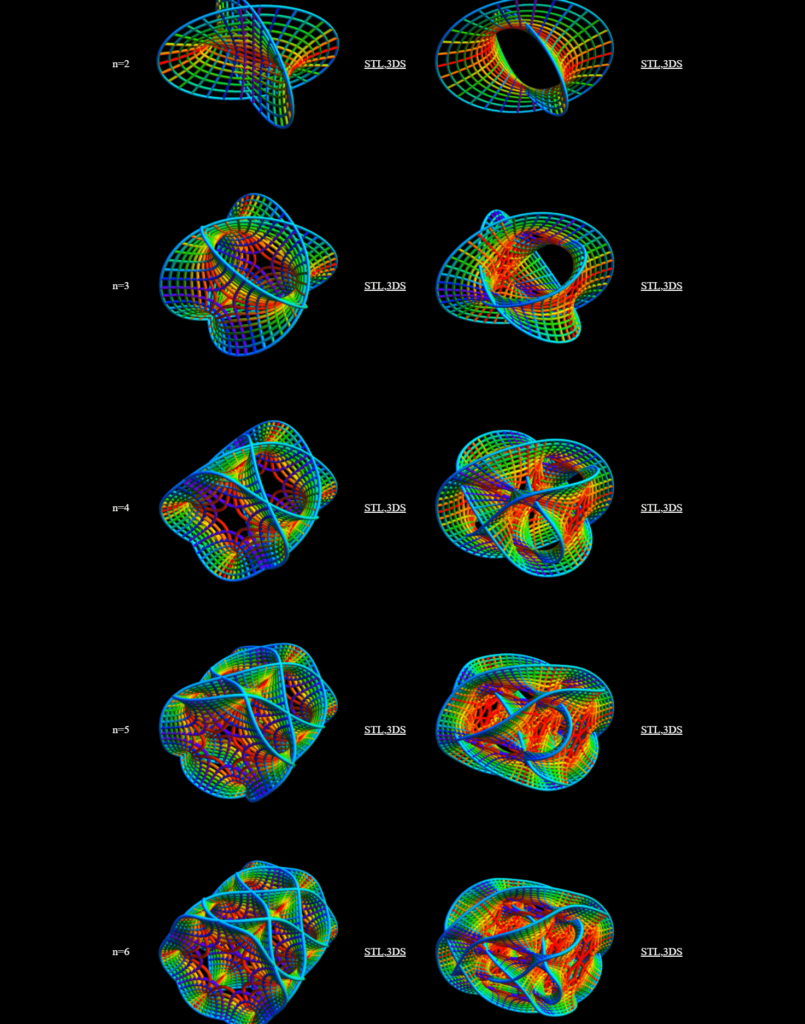
This image depicts a screenshot from Harvard Mathematical Department’s web page on Calabi-Yau manifold .STL files.
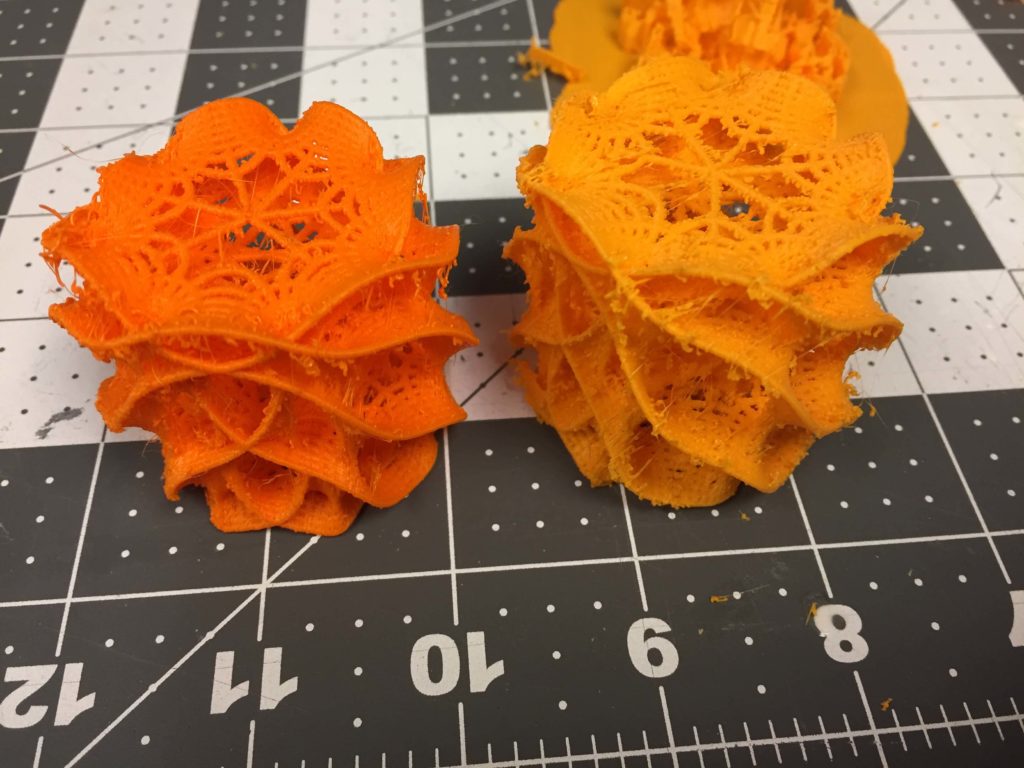
Two Calabi-Yau surfaces that I printed in the Makerspace.
By Harsimran S. Kalsi
Calabi-Yau
Manifolds (CYMs) are incredibly intricate geometric structures which have
several implications in mathematics and theoretical physics. In particular,
CYMs have been utilized in contexts such as superstring theory and in
explaining characteristics of higher dimensional spacetime.
In 2013, individuals at the Harvard Mathematics department created .stl files of various geometric shapes and published a very cool paper about using 3D printing technology to visualize mathematics. Knill and Slavkovsky stated that 3D printed representations of complex geometric objects/proofs could help promote understanding of the material.
After some time, it occurred to me that the overall shape of a CYM vaguely resembles some aspects of a protein beta-barrel structure. My interest in 3D printing biochemically relevant objects (mixed with my urge to test the limits of economically feasible 3D printing) ultimately encouraged me to pursue printing some of these manifolds.
Naturally, I decided to focus on printing the most complex manifolds first . . . both versions of the n=6 and n=7 manifolds (interestingly the n=2 and n=3 CYMs have been successfully printed previously: https://www.thingiverse.com/thing:165486) using PLA filament.
When I initially started this project I saw some very promising results. I wanted to design the CYM file settings in such a way, that one could print the file without any supports whatsoever. Afterall, anytime a print can avoid support material is generally a good thing (conserve filament, reduce printing time, and easier to batch print).
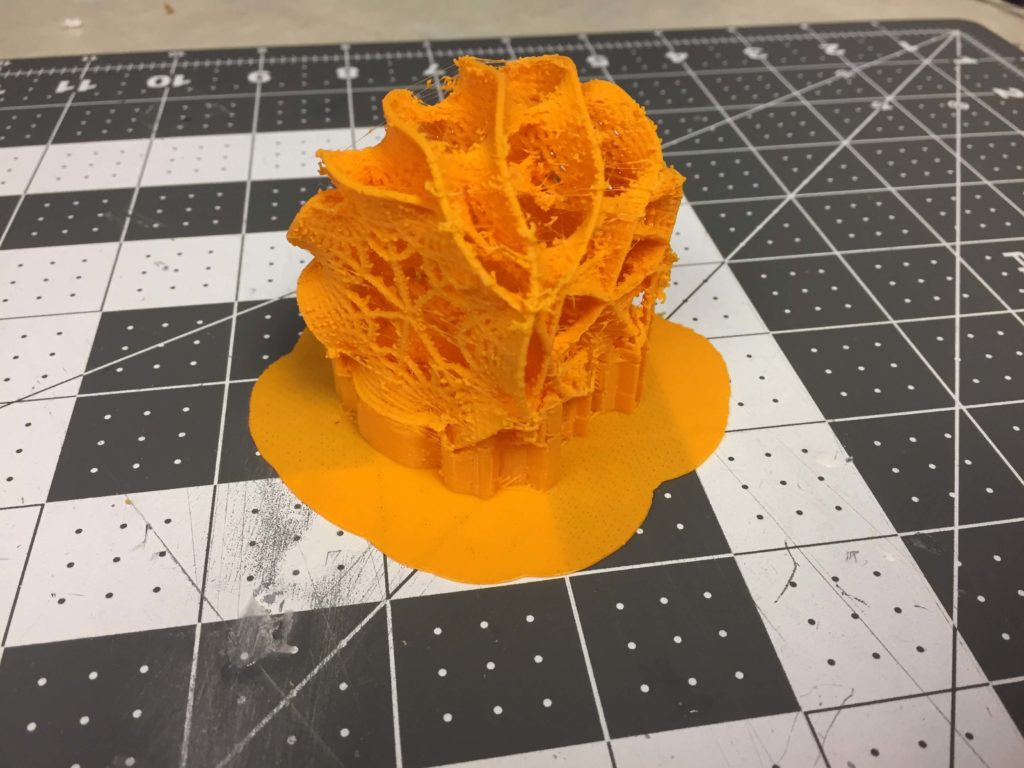
After what felt like dozens of failed prints I had almost become certain that printing a complicated structure like this without support was impossible.
A failed CYM attempt.
However, one day after making some final modifications to the size of the CYM and rotating its placement on the build plate (printing it horizontally–on its curves rather than vertically on its base) it was a success! The CYM printed without any supports and only required a raft! Upon further examination one could notice small frilly bits localized within the CYM but otherwise, the overall structure appeared to be high fidelity.
Successful CYM print with a raft but no supports.
Subsequently, I decided to continue playing around with various CYM files and parameters in addition to trying to replicate the support-free success. After several prints I found that the manifolds without the hole running through the middle were able to be printed on Ultimaker printers. I also found that the size of the CYM print had a huge impact on print success. It appeared that 45mm in length was the largest a print could get without becoming structurally compromised. This makes sense when one examines the internal structure of the CYM. Furthermore, it appeared that printing with supports connected to a raft, yielded the smoothest results.
~45mm length CYM with raft and 15% infil supports. Has much more “frillyness” compared to smaller versions without supports.
Using supports and a raft while rotating the print to be on its side, I was able to successfully print an n=7 CYM! A comparison of two CYMs can be seen below.
In conclusion, these test prints and trials have been very informative to me about the limitations of certain CAD programs and of 3D printers located in the Makerspace. This information is ultimately incredibly useful, as I continue printing intricate and novel objects (e.g. certain proteins) in the future.
Acknowledgements: All .stl files obtained here were obtained through Elizabeth Slavkovsky’s and Oliver Knill’s work posted here: http://www.math.harvard.edu/~knill/3dprinter/exhibits/calabiyau/index.html. Special thanks to Angela Vanden Elzen for her support and assistance throughout this project. Additional thanks to Deron Brown for assisting me during experimental prints.
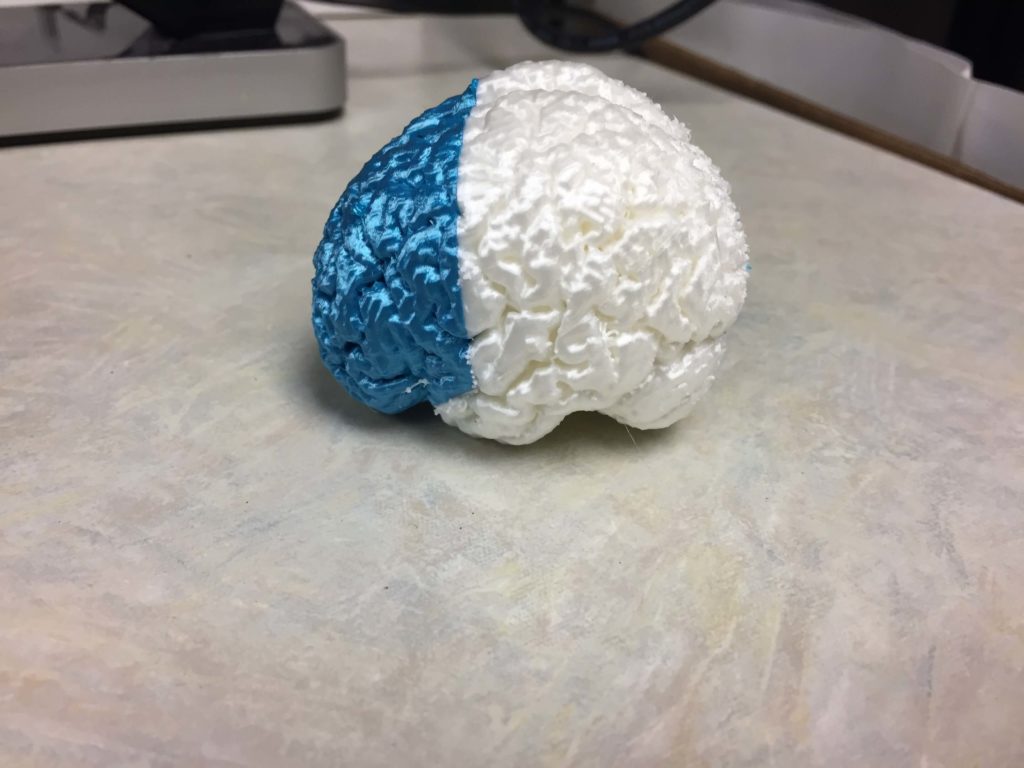
A dual color print of the human brain which highlights the frontal lobe in blue.
By Harsimran S. Kalsi
The human brain is arguably one of the most complex systems
that humanity has ever come across. A three-pound mass of “jelly” with over 86
billion neuronal cells, all stowed away in the dark caverns of our skulls. This
organ facilitates thinking, imagining, socially interacting, feeling, and so
much more that can sometimes go unnoticed in our daily lives.
The intricacy and wonder of the human brain as well as its
limitless potential as a target to enhance human health and wellbeing, are what
drive my deep interest in the brain. I’ve long been fascinated by it ever since
having first learned about Dr. David Eagleman’s work on creating new senses and
Dr. Vilanyur S. Ramachandran’s and Dr. Oliver Sacks’ work on fascinating
neurological cases.
Recently, I decided that I’d like to print a brain using
files from the NIH 3D Print Exchange. In particular, I wanted to modify and
print a file such that it highlights my favorite part of the brain–the frontal
lobe. Of the four major lobes of the brain, it is the largest and is located
just behind the forehead (at the front of both hemispheres). The frontal lobe
is principally responsible for planning/thinking about the future, attention,
motivation, and short-term memory (as well as some other features). In many
ways, characteristics of our frontal lobes help define aspects of what it means
to be human.
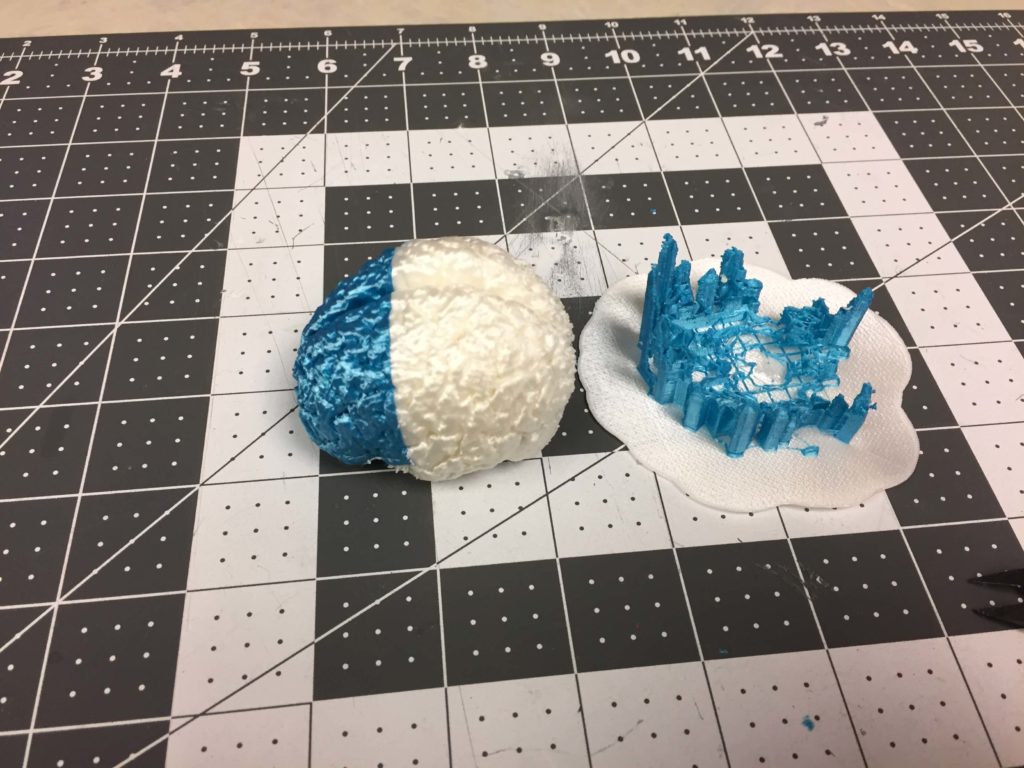
To “highlight” the frontal lobe I used the same method that I used previously to highlight distinct proteins on the surface of viruses. If you haven’t had a chance to read that post, you can find it here. In short summary, I used Meshmixer to divide the brain .stl into several distinct pieces and later merged them into specific groups, which could then be imported and manipulated in Cura (printing with an Ultimaker 3).
Overall, this process and print worked great! The prints came out fantastic and with a higher resolution of the sulci and gyri than I had initially anticipated. However, since I utilized the Meshmixer plane cut tool, the delineation of the frontal lobe from the other lobes is sometimes too sharp and a little off center. The frontal lobe is specifically separated from the parietal lobe by the Central Sulcus and separated from the temporal lobe by the lateral sulcus. This particular print does not show the frontal lobe in this much detail; however, it is a very close approximation (which appears to be off by ~1mm). Additionally, it is still useful from a “macro” educational and proof of concept perspective.
Acknowledgements: The original .stl of the brain was obtained from the NIH 3D Print Exchange. Special thanks to Angela Vanden Elzen for her support and assistance throughout this project.
Interested in adding 3D printing and other makerspace tools to your courses, but not sure how? Below is a presentation delivered to Lawrence University faculty about some of the whys and hows of using the LU makerspace with coursework.
What is a makerspace and what’s in our makerspace?
Why makerspaces?
Hands-On, Kinesthetic, Active Learning
Problem Solving Process
Differentiation of Learning
Prepare for Work
Wellness
Engaged Learning at Lawrence University
Challenges of educational makerspaces
Examples of uses from projects at LU and elsewhere by discipline/general subject area
Studio Art
Art History
Theatre Arts
Film Studies
Math & Computer Science
Music
Humanities
Anthropology
Psychology & Neuroscience
Sciences
Innovation & Entrepreneurship
Things made by students outside of classwork
Things made by student organizations and campus departments
Where to find this stuff?
3D print search engines & general repositories
Lesson plans
Designing
How to go about adding this stuff to your classes
Discussion
Since we presented this, we’ve also worked on a couple more ways to help faculty add the makerspace tools and equipment to their courses and research:
Makerspace Assignment Request Form: By letting us know about the intended learning outcomes and equipment they’d like to use, we can do some research and set up a time to meet to discuss assignment ideas.
Faculty 3D Printing Request Form: We’re happy to print objects that faculty may need for their teaching or scholarly/creative work. While faculty are welcome to come over and do their own printing, we know that sometimes this isn’t possible.
One slide from the presentation. Image links to the Google Slide of the full presentation.