
The Evil Weevil
By Harsimran Kalsi
Previously, I collaborated with Prof. Alyssa Hakes of the Biology department on a very interesting project, which highlights 3D printing’s high versatility and interdisciplinary potential. We worked on a project which may allow us to protect an endangered plant species known as the Pitcher’s Thistle (Cirsium pitcheri). This unique intersection of ecology and 3D printing is not intuitive at first, but it’s also an intersection that has only recently been explored by the scientific community.
Prof. Hakes has a wonderful page on experiments.com (https://experiment.com/projects/can-we-trap-invasive-weevils-and-protect-the-federally-threatened-pitcher-s-thistle) which describes the project in depth. In short summary, the goal was to fabricate decoys of the Pitcher’s Thistle (PT) to attract weevils away from the real and vulnerable plant. We wanted to make the decoys as high fidelity as possible considering things like shape, size, color, and reflectiveness. We also wanted to optimize these decoys such that they were easy to print/work with and easy to deploy in the field.
During the initial design phase, one of the biggest challenges was trying to replicate the topology of the PT. The small pineapple-like protrusions on the curved surface of the bud, proved difficult to design and we anticipated that it might also be challenging to print. In a stroke of genius, Angela Vanden Elzen had the creative idea to modify a design she’d happened to come across on Thingiverse. The file was of a lamp shade which Angela then further modified by placing two inside one another, adding a sphere to the middle, and inserting a hole through the base (so the decoy could be placed onto a dowel which would act as the plant stem). This ultimately resulted in a decoy which looked something like this:
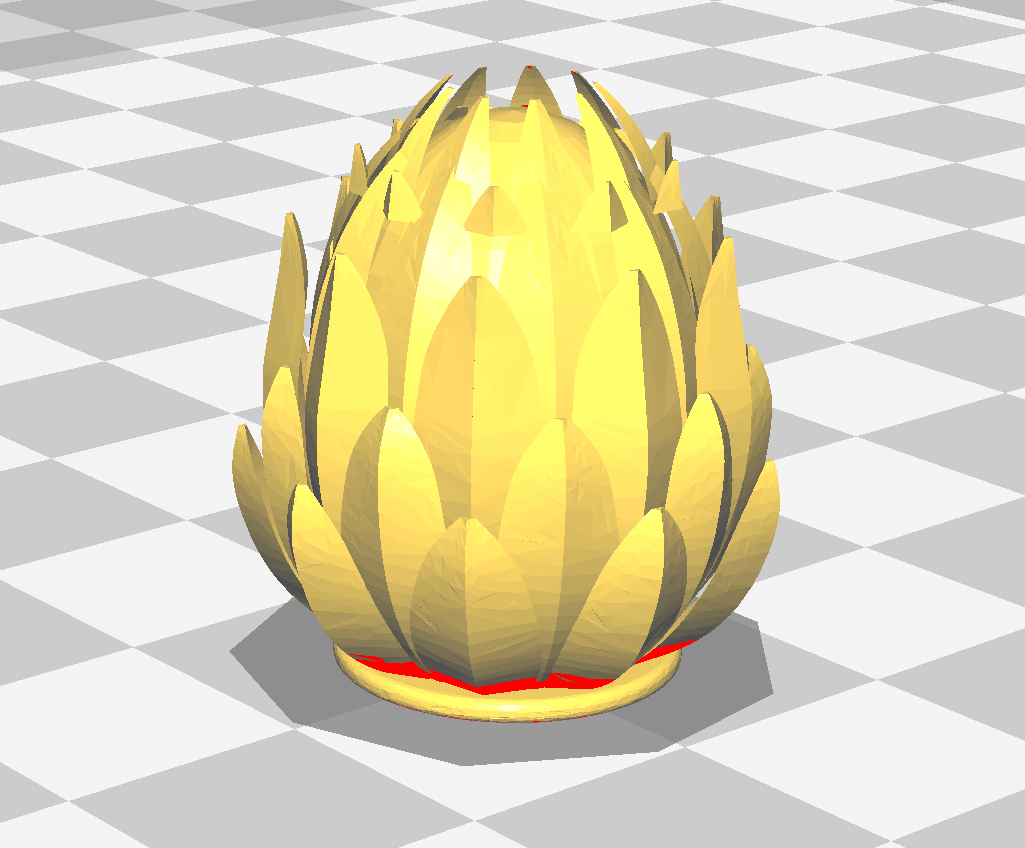
Interestingly, we discovered that the “spiky” parts of this design weren’t printed exactly like they are shown in the .stl file. Instead, because of printing limitations (e.g. the angles of these edges) we ended up with decoys that displayed intricate, thin, somewhat “frilly”, and lengthwise fibers which surrounded the bud. Ultimately, these fibers actually helped make the decoys even more realistic in terms of texture. They also facilitated some of our feasibility constraints (e.g. no supports in the design makes it quick to scale up printing and the protrusions may make adding/maintaining adhesive easier).
As we were printing, we utilized several different shades of green (including an algal based filament which was surprisingly . . . aromatic). We initially relied on prof. Hakes’ previous field experience to determine colors that best match the PT. Later we decided we could use images of the PT (taken by prof. Hakes in the field) to obtain a hex code and subsequently a customized color filament. But where could we order customized color filament? As it turns out, about 10 minutes away from the Makerspace is a local business called Coex, which supplies several different types of filament. We then began collaborating with them to create this custom filament.

Finally, we began printing the fourth (or so) iteration of the decay using the custom filament from Coex. We batch printed several for prof. Hakes to use for field experiments over the summer. For more updates about the project, check out this link: https://experiment.com/projects/can-we-trap-invasive-weevils-and-protect-the-federally-threatened-pitcher-s-thistle/labnotes?tag=project-milestone#labnotes
Acknowledgements:
Special thanks to Dr. Alyssa Hakes and Angela Vanden Elzen for their support and guidance throughout this project.
Update: The Lawrence University news blog wrote a story about this project at https://www.lawrence.edu/articles/research-looks-invasive-weevils-along-lake-michigan-shoreline


