By Wenchao Liu
When I was a happy college student at Lawrence, I made a wall-following RC car. The project was truly a blessing, because it led me to many amazing people such as Prof. Stoneking and Angela. My theoretical-physicist-turned-computer-scientist professor, Prof. Gregg, helped me a lot during the process as well. My presentation day was one of my proudest days, as I was showing a room of my professors that I was actually not that dumb.
It’s been a year since that presentation day, and I am still living in the past. Currently I am building the second version of the car, following instructions on f1tenth.org. The second version has quite a few improvements over the first one, and I have learned quite a lot so far. This post is about such improvements and what I plan to do in the future. It’s like the project proposal I gave in college, which wasn’t fully executed.
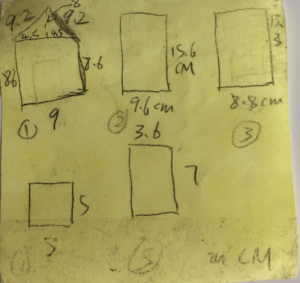
The most obvious improvement is a mechanical one. The previous build has two layers of plastics, which are connected also by plastics. As a result, the build is not rugged and glue was frequently applied. The new build has only one layer of plastics, and it’s mounted on a lower level than the base layer of the old build.

Just One Layer!
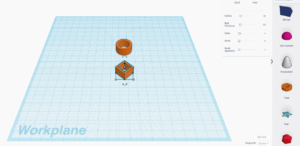
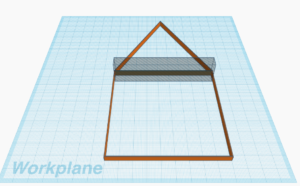
The electrical improvement is less obvious, but still visible. I had to changed the brushed motor to a brushless one, and to buy a VESC to control that. Thus, a Teensy micro-controller is not longer needed, as the computer can just control the VESC directly. The second build also uses an Orbitty carrier board, which has a smaller form factor than the previous one. Form factor; what a jargon word!

Can you tell which one is the current one?
The software improvement is not even visible as all, but it’s always been most frustrating. Although the only functionality I had with the previous build was wall-following, the car could actually do a lot more. The main functionalities I am trying to implement now are mapping with Lidar, localizing the car, generating and following waypoints. That’s where the f1tenth.org stops, but I won’t stop learning for a long time!
Stay tuned!